Yenilikçi Gripper Tasarımı: İnsan Stratejilerinden İlham Alınarak Geliştirildi
Seul Ulusal Üniversitesi’nden bir araştırma ekibi, insanların birden fazla nesneyi aynı anda taşıma stratejilerinden ilham alarak çoklu nesneleri etkili bir şekilde taşıyabilen yenilikçi bir gripper tasarladı. Bu gripper, yalnızca nesneleri bir arada taşımakla kalmayıp, aynı zamanda her bir nesneyi belirli bir konuma yerleştirme yeteneğine de sahiptir. Bu çalışma, insan hareket prensiplerini derinlemesine inceleyerek bu bilgileri robotik bir gripper’a başarıyla entegre etmiştir.
Araştırma, 2019 yılında fabrika çalışanlarının nesneleri tek tek taşımak yerine aynı anda birden fazla nesneyi taşıdıklarını gözlemlemeleriyle başlamıştır. Araştırmanın lideri Profesör Kyu-Jin Cho, geleneksel gripper tasarımlarının genellikle tek bir nesneyi taşımaya odaklandığını belirterek, çoklu nesne kavramına yönelik geliştirilen gripper’ların genellikle robot kollarının uç kısmına yerleştirilmiş küçük gripper’lardan oluştuğunu ve bu sistemlerin yalnızca karmaşık yapısal ortamlarda etkili bir şekilde çalışabildiğini ifade etti.
Bu nedenlerle, araştırma ekibi insanların çoklu nesne kavrama stratejisini analiz ederek, bu yeteneği taklit eden bir gripper tasarımı geliştirmeye karar verdi. Geliştirilen gripper, nesneleri sırasıyla kavrayabilme, saklayabilme, birden fazla nesneyi aynı anda transfer edebilme ve her bir nesneyi istenilen konuma yerleştirebilme becerisine sahiptir.
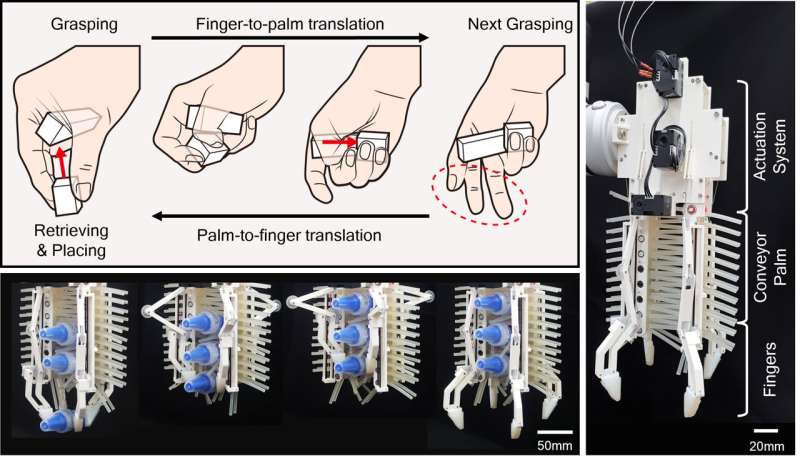
İnsanların nesneleri parmaklardan avuca çevirme hareketiyle sakladığı ve daha sonra avuçtan parmaklara çevirme hareketiyle her bir nesneyi tek tek yerleştirdiği stratejiye dayanan bu gripper, son derece esnek bir tasarıma sahiptir. Gripper’ın parmakları, iki motorla nesneleri kavrayarak avuç içine taşırken, avuç kısmı ise elastik tüylere sahip kayışlar aracılığıyla nesneleri saklayıp taşıma işlevi görmektedir.
Laboratuvar deneylerinde, bu yenilikçi gripper (MOGrip), lojistik ortamda sekiz nesnenin sadece iki hareketle taşınmasını sağlamıştır. Bu yöntem, tek nesne taşımaya kıyasla işlem süresini %34 oranında kısaltırken, robot kolunun seyahat mesafesini ise %71 oranında azaltmıştır. Ayrıca, evde yapılan denemelerde gripper, tüm nesneleri masanın üzerine yerleştirip, her birini istenilen noktaya başarıyla taşıyabilmiştir.
Araştırmanın kıdemli araştırmacısı Profesör Cho, “Doğanın prensipleri, verimli robot hareketi ve aktüatör stratejileri için ilham kaynağıdır. Parmaktan avuca çevirme ve avuçtan parmaklara çevirme hareketleri, çoklu nesne kavrama stratejisinin temel bileşenlerindendir. Geliştirilen gripper, bu prensiplerin bir robota uygulanmasının ilk ve en etkili örneğidir” diyerek çalışmanın önemini vurgulamıştır.
Kaynak: Yeniçağ


 02:00
02:00



 News
News

 EvosTech
EvosTech
 EvosTech
EvosTech
 EvosTech
EvosTech
 EvosTech
EvosTech
 EvosTech
EvosTech

 EVOSTECH
EVOSTECH
 EVOSTECH
EVOSTECH
 EVOSTECH
EVOSTECH
 EVOSTECH
EVOSTECH
 EVOSTECH
EVOSTECH




